Algebra
Algebra:
import numpy as np
import seaborn as sns
import matplotlib.pyplot as plt
%matplotlib inline
sns.set()
1. Dot Product
$$ u = M.v, C = A.B $$
v = np.random.rand(5)
v
array([ 0.61880652, 0.16277711, 0.77725885, 0.39357105, 0.72518988])
M = np.random.rand(5,5)
M
array([[ 0.44722927, 0.75871176, 0.74971577, 0.83610699, 0.18085266],
[ 0.00121306, 0.84271476, 0.65241612, 0.27094445, 0.63364293],
[ 0.07906587, 0.85301928, 0.62214839, 0.59205861, 0.70427723],
[ 0.88162665, 0.76250728, 0.15724579, 0.63985535, 0.04617605],
[ 0.57250482, 0.6551876 , 0.562632 , 0.29052545, 0.29159418]])
u = np.dot(M,v)
u
array([ 1.44319253, 1.21116885, 1.41510068, 1.07721068, 1.22403352])
M = np.random.rand(5,5)
N = np.random.rand(5,5)
np.dot(M,N)
array([[2.04187416, 1.27819139, 1.95077838, 1.61949482, 1.17248351],
[1.7066333 , 0.83570007, 1.52109089, 1.39001526, 0.71187379],
[1.44468595, 0.79383607, 1.35776556, 1.11653487, 0.79871042],
[1.51494078, 1.10723018, 1.52666191, 1.23628874, 1.00665592],
[0.51859666, 0.65862101, 0.61337647, 0.40747731, 0.66203929]])
2. Kronecker Product

I = np.eye(3)
O = np.ones((3,3))
I,O
(array([[1., 0., 0.],
[0., 1., 0.],
[0., 0., 1.]]), array([[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.]]))
KIO = np.kron(I,O)
KIO
array([[1., 1., 1., 0., 0., 0., 0., 0., 0.],
[1., 1., 1., 0., 0., 0., 0., 0., 0.],
[1., 1., 1., 0., 0., 0., 0., 0., 0.],
[0., 0., 0., 1., 1., 1., 0., 0., 0.],
[0., 0., 0., 1., 1., 1., 0., 0., 0.],
[0., 0., 0., 1., 1., 1., 0., 0., 0.],
[0., 0., 0., 0., 0., 0., 1., 1., 1.],
[0., 0., 0., 0., 0., 0., 1., 1., 1.],
[0., 0., 0., 0., 0., 0., 1., 1., 1.]])
KOI = np.kron(O,I)
KOI
array([[1., 0., 0., 1., 0., 0., 1., 0., 0.],
[0., 1., 0., 0., 1., 0., 0., 1., 0.],
[0., 0., 1., 0., 0., 1., 0., 0., 1.],
[1., 0., 0., 1., 0., 0., 1., 0., 0.],
[0., 1., 0., 0., 1., 0., 0., 1., 0.],
[0., 0., 1., 0., 0., 1., 0., 0., 1.],
[1., 0., 0., 1., 0., 0., 1., 0., 0.],
[0., 1., 0., 0., 1., 0., 0., 1., 0.],
[0., 0., 1., 0., 0., 1., 0., 0., 1.]])
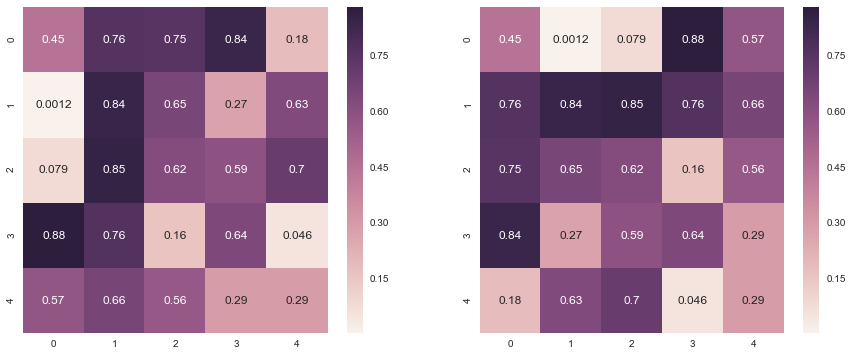
3. Transpose of a matrix
plt.figure(figsize = [15,6])
plt.subplot(1,2,1)
sns.heatmap(M, annot=True)
plt.subplot(1,2,2)
sns.heatmap(M.T, annot=True)
<matplotlib.axes._subplots.AxesSubplot at 0x11ce902b0>
4. Solve Matrix Equation : $$\large{Ax = b}$$
$$2x_1 + 3x_2 +5x_3 + 4x_4 +2x_5 = 19$$
$$5x_1 + 4x_2 +2x_3 + 6x_4 +1x_5 = 23$$
$$9x_1 + 2x_2 +4x_3 + 5x_4 +2x_5 = 45$$
$$1x_1 + 9x_2 +6x_3 + 9x_4 +3x_5 = 56$$
$49x_1 + 7x_2 +8x_3 + 4x_4 +x_5 = 12$$
import numpy.linalg as LA
A = np.array([[2,3,5,4,2],[5,4,2,6,1],[9,2,4,5,2],[1,9,6,9,3],[9,7,8,4,1]])
b = np.array([19,23,45,56,12])
x = LA.solve(A,b)
x
array([ 4.57281553, 9.84789644, -12.78964401, -8.95145631,
40.03236246])
np.dot(A,x)
array([19., 23., 45., 56., 12.])
5. Inverse
LA.det(A)
-927.0000000000007
AI = LA.inv(A)
AI
array([[-0.21359223, -0.09708738, 0.17152104, 0.04854369, 0.03559871],
[-0.57605178, -0.35275081, 0.18985976, 0.34304207, 0.09600863],
[ 0.60517799, 0.27508091, -0.3193096 , -0.30420712, 0.06580367],
[ 0.52427184, 0.60194175, -0.33009709, -0.30097087, -0.08737864],
[-0.98381877, -1.26537217, 1.0021575 , 0.79935275, -0.16936354]])
np.dot(AI,A)
array([[ 1.00000000e+00, 6.24500451e-17, 1.66533454e-16,
1.66533454e-16, 6.93889390e-17],
[-9.71445147e-17, 1.00000000e+00, 0.00000000e+00,
3.33066907e-16, 1.80411242e-16],
[ 4.57966998e-16, -2.91433544e-16, 1.00000000e+00,
-2.22044605e-16, -1.52655666e-16],
[-6.52256027e-16, -1.38777878e-17, -5.55111512e-16,
1.00000000e+00, -2.08166817e-16],
[ 5.82867088e-16, -5.82867088e-16, 2.22044605e-16,
9.99200722e-16, 1.00000000e+00]])
6. Singular Value Decomposition: Find Principle Axis
$$\large{A =PDQ}$$
$$X^{T}AX = 4x_1^2 + 6x_2^2 + 8x_3^2+ 8x_1x_2 + 6x_2x_3 - 16x_3x_1$$
$$ X^{T}AX = \begin{pmatrix} x_1 & x_2 & x_3 \end{pmatrix}\begin{pmatrix} 4 & 4 & -8 \\ 4 & 3 & 3 \\ -8 & 3 & 4 \end{pmatrix}\begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix}$$
$$X^{T}AX = 12.06 x_1^2 + 6.56 x_2^2 + 5.5 x_3^2 $$
A = np.array([[4,4,-8],[4,3,3],[-8,3,4]])
P,D,Q = LA.svd(A)
D
array([12.06630095, 6.56787841, 5.50157746])
P
array([[-0.72405638, 0.63996989, 0.25725649],
[-0.09331565, -0.46043612, 0.88277447],
[ 0.68339926, 0.61517243, 0.39310092]])
Q
array([[-0.72405638, -0.09331565, 0.68339926],
[-0.63996989, 0.46043612, -0.61517243],
[ 0.25725649, 0.88277447, 0.39310092]])
LA.inv(P)
array([[-0.72405638, -0.09331565, 0.68339926],
[ 0.63996989, -0.46043612, 0.61517243],
[ 0.25725649, 0.88277447, 0.39310092]])
AN = np.matmul(np.matmul(P, np.diag(D)), Q)
AN
array([[ 4., 4., -8.],
[ 4., 3., 3.],
[-8., 3., 4.]])
A
array([[ 4, 4, -8],
[ 4, 3, 3],
[-8, 3, 4]])
LA.det(P),LA.det(Q)
(1.0000000000000004, -1.0000000000000002)